Nuevos termostatos dominar simultáneamente las funciones de elevación y descenso de control
El daño al sistema de refrigeración es una de las principales razones del desguace del refrigerador, pero el gabinete está intacto y muchos laboratorios requieren una incubadora a temperatura constante. Es de gran importancia práctica transformar un refrigerador de desechos en una incubadora de temperatura constante. El autor está en la práctica de transformar los refrigeradores de chatarra en incubadoras de temperatura constante (en adelante denominadas incubadoras de temperatura constante). Usando el circuito de un solo chip, la precisión del control de temperatura mejora al optimizar la programación, de modo que el índice de rendimiento técnico cumpla o exceda los requisitos de la incubadora de temperatura constante actual en el mercado.
Los principales indicadores técnicos son los siguientes:
Rango de control de temperatura: 5-40 ° C;
Tolerancia de fluctuación de temperatura: ± 0.2 ° C; tolerancia a la uniformidad de temperatura; ± 0.5 ° C.
Los principales indicadores técnicos son los siguientes:
Rango de control de temperatura: 5-40 ° C;
Tolerancia de fluctuación de temperatura: ± 0.2 ° C; tolerancia a la uniformidad de temperatura; ± 0.5 ° C.
Al renovar la chatarra del refrigerador en una incubadora de temperatura constante, primero retire el sistema de refrigeración del refrigerador. Al retirarlo, preste atención para proteger el gabinete y luego instale el termostato y el ventilador en la posición correcta. La incubadora del termostato necesita calefacción y refrigeración, mientras que el termostato comercial solo tiene la función única de calefacción o refrigeración, que no puede cumplir con los requisitos de la incubadora del termostato. Por lo tanto, la clave para la renovación de los refrigeradores de chatarra es desarrollar un tipo de controlador de temperatura que integra las funciones de subir y bajar la temperatura y tiene una alta precisión de control de temperatura. Este artículo describe un controlador de temperatura de incubadora de temperatura constante hecho a sí mismo (denominado controlador de temperatura).
1, el principio de funcionamiento
El termostato utiliza el microordenador de un solo chip 8031 como núcleo, y utiliza el termómetro de mercurio de contacto eléctrico para ajustar la temperatura. El control de temperatura de la incubadora de temperatura constante se realiza regulando el ciclo de encendido y apagado del termómetro de mercurio de contacto eléctrico. El microordenador de un solo chip detecta automáticamente el calentamiento o enfriamiento al detectar el estado de encendido y apagado del termómetro de mercurio de contacto eléctrico. Cuando se necesita elevar la temperatura, se adopta el calentamiento de la placa de calentamiento, el control de un solo chip y el modo de ajuste de potencia de tiristores de dos vías. Cuando es necesario enfriar, el refrigerador de semiconductores se enfría y se adopta el modo de control de un solo chip para que la precisión del control de temperatura alcance un nivel alto.
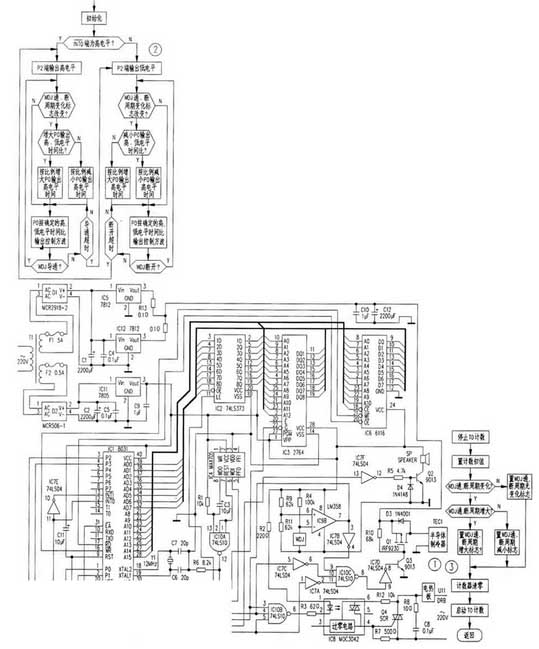
El circuito se muestra en la Figura 1. Se compone principalmente de un circuito de identificación automática para subir y bajar, circuito de control de calefacción, circuito de control de enfriamiento y circuito de alarma de temperatura anormal.
1. Circuito de reconocimiento automático para subir y bajar temperatura
1. Circuito de reconocimiento automático para subir y bajar temperatura
2. circuito de control de temperatura
Cuando es necesario elevar la temperatura, el séptimo pin de IC9B emite un nivel alto, de modo que el pin 3 de la compuerta NAND IC10B (74LS10) es alto. Al mismo tiempo, el alto nivel de la salida de 7 pines de IC9B pasa a través del IC7B sin compuerta para hacer que los 9 pines de la compuerta NAND IC10C sean bajos, y la compuerta NAND IC10C se apaga, y el circuito de enfriamiento no puede trabajo. Cuando la MCU reconoce automáticamente que el horno necesita calentarse, configure el terminal P2 (salida de alto nivel) y genere una onda cuadrada con una relación de trabajo de 1: 1 desde el terminal PO. IC l OB 5 pies son de alto nivel, 4 pies son onda cuadrada, su salida de 6 pines y onda cuadrada invertida de 5 pines, IC8 se energiza, el SCR de tiristor bidireccional se enciende, la placa caliente comienza a suministrar al incubadora de calor. En este momento, aunque el noveno pin de IC10C se convierte en un nivel alto, el undécimo pin está en un nivel bajo, por lo que la puerta NAND IC10C se mantiene apagada y el circuito de caída de temperatura aún no funciona.
Cuando la temperatura de la incubadora alcanza la temperatura establecida, WDJ se enciende. En este momento, el potencial de 5 pines de IC9B es inferior a 6 pines, la salida de 7 pines es baja, la puerta NAND IC10B está apagada, su salida de 6 pines es alta, IC8 deja de funcionar y la placa caliente deja de calentarse. Al mismo tiempo, la salida de 7 pines de IC9B se envía baja a IN1 C7 de IC1, su flanco descendente provoca la interrupción de IC 1, y la rutina de servicio de interrupción externa hace que el temporizador interno de IC 1 comience a contar.
Después de que la placa de calentamiento deja de calentar, la temperatura de la incubadora comienza a descender. Después de un período de tiempo, el WDJ se desconecta y la placa de calentamiento eléctrico comienza a calentar el dispositivo de control de temperatura nuevamente. Cuando se calienta a la temperatura establecida, WDJ se enciende y el séptimo pin del IC9 emite un nivel bajo, por un lado, la placa de calentamiento deja de calentarse; Por otro lado, se activa la interrupción INTO, de modo que el TO deja de contar, después de analizar y juzgar los períodos de encendido y apagado del WDJ y yuxtaponer los bits de bandera correspondientes. El TO comienza a contar nuevamente y almacena los ciclos de encendido y apagado del WDJ actual para compararlos con los siguientes ciclos de encendido y apagado. TO funciona en el modo 2, cuando la unidad de tiempo de bajo orden se desborda, la interrupción de TO se activará para completar el transporte desde la unidad de tiempo de bajo orden a la unidad de tiempo de alto orden, es decir, TO constituye un temporizador de hoja de cálculo. El programa principal realiza el procesamiento de cálculo de acuerdo con el bit indicador, y aumenta o disminuye la relación de trabajo de la onda cuadrada de salida de onda cuadrada a una cierta relación en el período básico (WDJ una vez encendido, apagado), y emite el pulso de control de temperatura De acuerdo con la relación de tiempo. De esta manera, el número de ciclos de conducción del SCR triac se cambia dentro de un cierto período de tiempo, y se controla la potencia de la placa caliente. El algoritmo de control es el siguiente:
Si el período de encendido / apagado actual del WDJ es menor que la última vez, la relación entre el tiempo alto y bajo de la salida de PO se reduce en el período básico. De lo contrario, las relaciones de tiempo alto y bajo de salida de PO aumentan en el período básico, y finalmente los períodos de encendido y apagado de WDJ son los más cortos. El extremo PO emite el pulso de control de temperatura de acuerdo con el pulso del ciclo de trabajo determinado de ese modo, y el calor perdido por el horno y el calor proporcionado por la placa calefactora eléctrica alcanzan sustancialmente un equilibrio dinámico, de modo que la precisión de control alcanza un alto nivel. Se puede ver que la placa caliente no solo está controlada por el WDJ, sino también por el pulso de salida de PO. El WDJ controla si el dispositivo de control de temperatura se calienta, y el pulso de la salida PO controla la relación de tiempo del tiristor bidireccional encendido y apagado, controlando así la potencia de la placa caliente.
3. Circuito de control de enfriamiento
Cuando es necesario enfriar, el pin 7 de salida de la puerta IC9B exhibe un nivel bajo. Después de la inversión del IC7B sin compuerta, por un lado, el pin 9 de la compuerta NAND IC10C (74LS10) está en un nivel alto, por un lado, el IC10B se apaga y el circuito de aumento de temperatura no funciona Cuando el chip único reconoce que el horno debe enfriarse, el terminal P2 se reinicia (salida de nivel bajo) y el terminal P0 emite una onda cuadrada con una relación de trabajo de 1: 1. IC7A invierte el nivel bajo de la salida P2 y lo envía al 11 ° pin de IC10C, de modo que se libera la salida de 8 pines de IC10C. Transistor 9013, FET Q1 de alta potencia continúa trabajando con la onda, el enfriador de semiconductores funciona y el horno comienza a enfriarse.
Cuando la temperatura cae al valor establecido, el WDJ se apaga y el circuito de enfriamiento deja de funcionar. Como la incubadora todavía está en estado de enfriamiento en este momento, el terminal P2 del chip único está en un nivel bajo, la puerta NAND IC10B está apagada y la placa caliente no funciona. Después de que el refrigerador de semiconductores deja de enfriarse, la temperatura comienza a aumentar. Después de un período de tiempo, el WDJ se enciende y el enfriador de semiconductores comienza a enfriarse nuevamente. El proceso de enfriamiento es similar al proceso de aumento de temperatura y control de temperatura. La diferencia es que el circuito de control de temperatura controlado por temperatura utiliza la salida de onda cuadrada ajustada del terminal PO de un solo chip para controlar el tiempo de trabajo del refrigerador de semiconductores. Finalmente, el calor absorbido por la incubadora desde el exterior y el calor absorbido por el enfriador de semiconductores del tanque están básicamente equilibrados, de modo que la precisión de control alcanza un alto nivel.
4. Circuito de alarma de temperatura anormal
Cuando el circuito de control de temperatura funciona normalmente, el ciclo de encendido / apagado del termómetro de mercurio de contacto eléctrico generalmente es de varias decenas de segundos. Si el circuito de control de subida y bajada falla, este ciclo inevitablemente será anormal. El límite superior del ciclo se establece de acuerdo con el volumen del horno (establecido en el programa de temporización). Cuando el período excede el valor límite superior, el terminal P3 del microordenador de un solo chip emite un nivel bajo, y después de que se invierte el IC7F, el Q2 se enciende satisfactoriamente y la sonda de micro-CC autónoma SP se energiza para generar un sonido de alarma
Segundo, diseño de software.
El software de control consta de tres partes: el programa principal, el programa de servicio INTO de interrupción externa y el programa de servicio de temporizador PARA interrumpir.
Tercero, diseño de fiabilidad
El controlador de temperatura utiliza dispositivos semiconductores como un tiristor y un transistor de efecto de campo para controlar los elementos ascendentes y descendentes de la placa calefactora eléctrica y el refrigerador semiconductor. eliminando así la desventaja de que el contacto del relé puede causar una pérdida de temperatura debido al mal contacto de oxidación.
Esta aplicación también utiliza el circuito de monitoreo por microprocesador producido por MAX. Cuando el programa se ejecuta, el extremo WDI será "menor que la señal de pulso en 1.6s, y el extremo WDO emitirá un nivel bajo, de modo que el décimo pin del IC10A emite un nivel alto, y el IC 1 se reinicia. Efectivamente evite que el programa se escape y provoque que la temperatura se descontrole.Además, se agregan trampas de software en ubicaciones apropiadas en la población no utilizada y en el espacio en blanco de la memoria del programa para evitar que el programa se escape.
Corrección automática del juicio erróneo de subida y enfriamiento Cuando la MCU está en un estado de calentamiento y acaba de alcanzar la temperatura predeterminada y se detiene, si se produce un corte de energía, de repente llamará. La MCU se reiniciará y juzgará erróneamente que la incubadora debe estar en estado de enfriamiento. Cuando la MCU está en estado de enfriamiento, existe una situación similar. El método para corregir automáticamente este error de juicio por parte del microordenador de un solo chip es que después del restablecimiento del microordenador de un solo chip, el dispositivo para subir y bajar la temperatura se controla automáticamente de acuerdo con el estado detectado de subida y bajada. Si el número de minutos (de acuerdo con el volumen de la caja está configurado por el software), el estado del termómetro de mercurio de contacto interno no cambia, lo que indica que la discriminación es incorrecta. el microcontrolador luego cambia el nivel del terminal P2, cambiando así el estado de subida y bajada.




